Radio controlled drones are extremely popular and you can get them in all shapes and sizes. In recent years, one specific type of drone has seen a sudden rise in popularity: micro quadcopters. They fit in your palm but can be powered by high-RPM brushless motors and a two-cell Li-Po battery, so they have, potentially, tons of power. Combine it with first-person video transmission and you have one amazing toy that’s nearly indestructible. And today, we’ll demonstrate that RC vehicles and our 3D printers are a perfect match! We’re going to tell you how to build a cheap, yet powerful, 3D printed mini quadcopter suitable for both indoor and outdoor flying thanks to its diagonal size of 90mm (measured from the motor to motor).
Why should you build it?
Various stores across the world have a large selection of drones. Some are powered by brushed motors, others are brushless, some are smaller, some bigger… the very basic brushless models can go as low as 30 USD, but this price can only be reached by making some really major compromises – short range, low-quality motors, bad camera and missing accessories such as RC transmitter, FPV goggles, batteries or chargers. Plus, if you break something (usually the frame), getting spare parts can be pretty challenging – that’s why we’re printing our own frame on the Original Prusa i3 MK3! 3D printed frames are actually very light and if you print them with PETG (you can try Prusament PETG if you want 😉 ), they can withstand some rough handling. And if they don’t, you can print tons of new ones. Also, you can use all kinds of colors! More about that later.
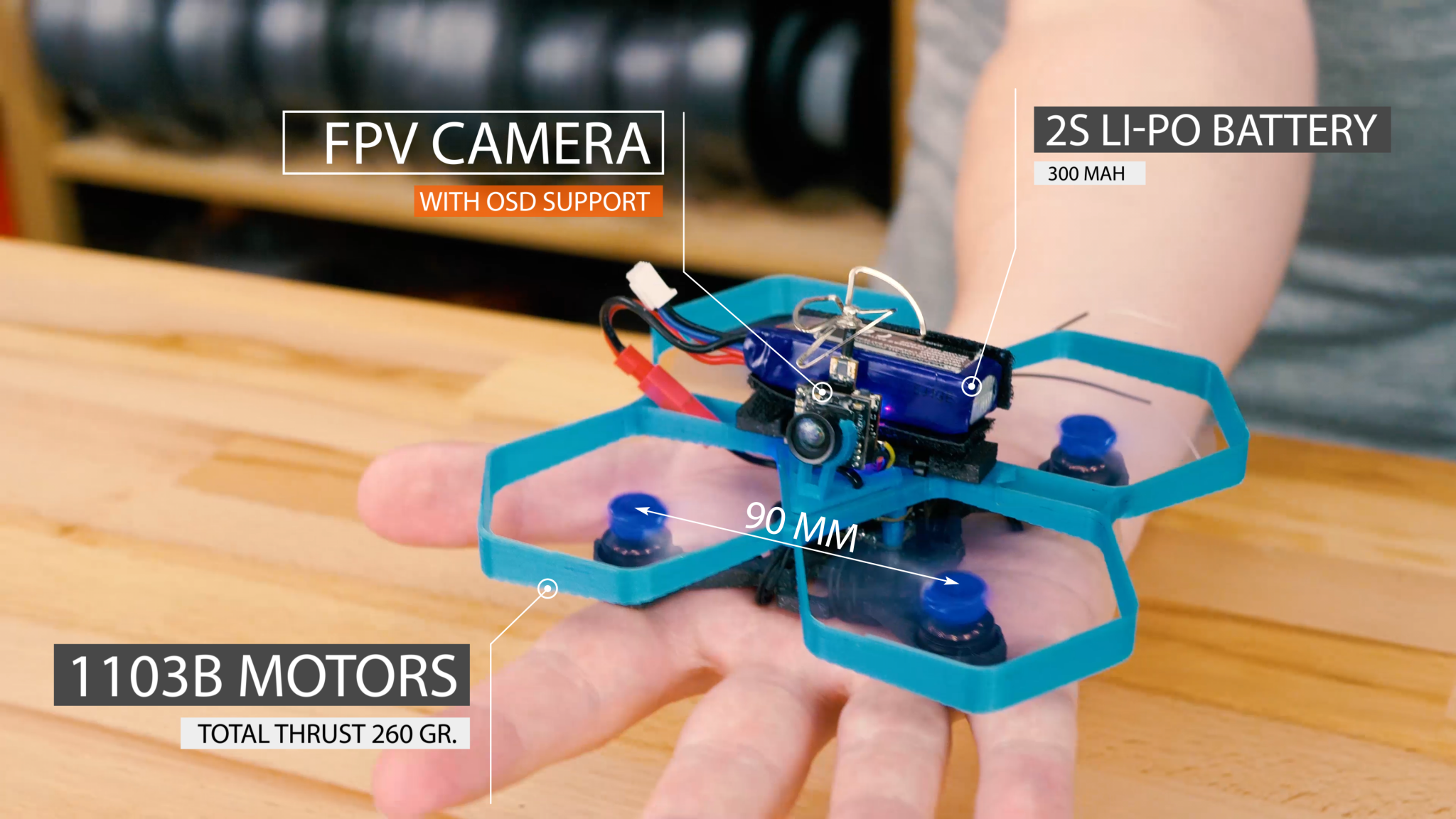
Our tiny drone is ready for some indoor and outdoor FPV flying!
Now, back to ARF (Almost Ready to Fly) or RTF (Ready to Fly) drones. Generally speaking, you are more likely to find a good machine in the 150-200 USD range. But again, this price does not include an RC transmitter, batteries or FPV goggles, so the actual prices can easily climb to over 400 USD for more-or-less reasonable equipment. Flying pros will probably tell you that a set of good FPV goggles is actually 400 USD alone. Sounds like a lot, so let’s try to find a sweet spot and create something that can be considered a good start and can be further expanded in case you fall in love with this hobby.

What do we need?
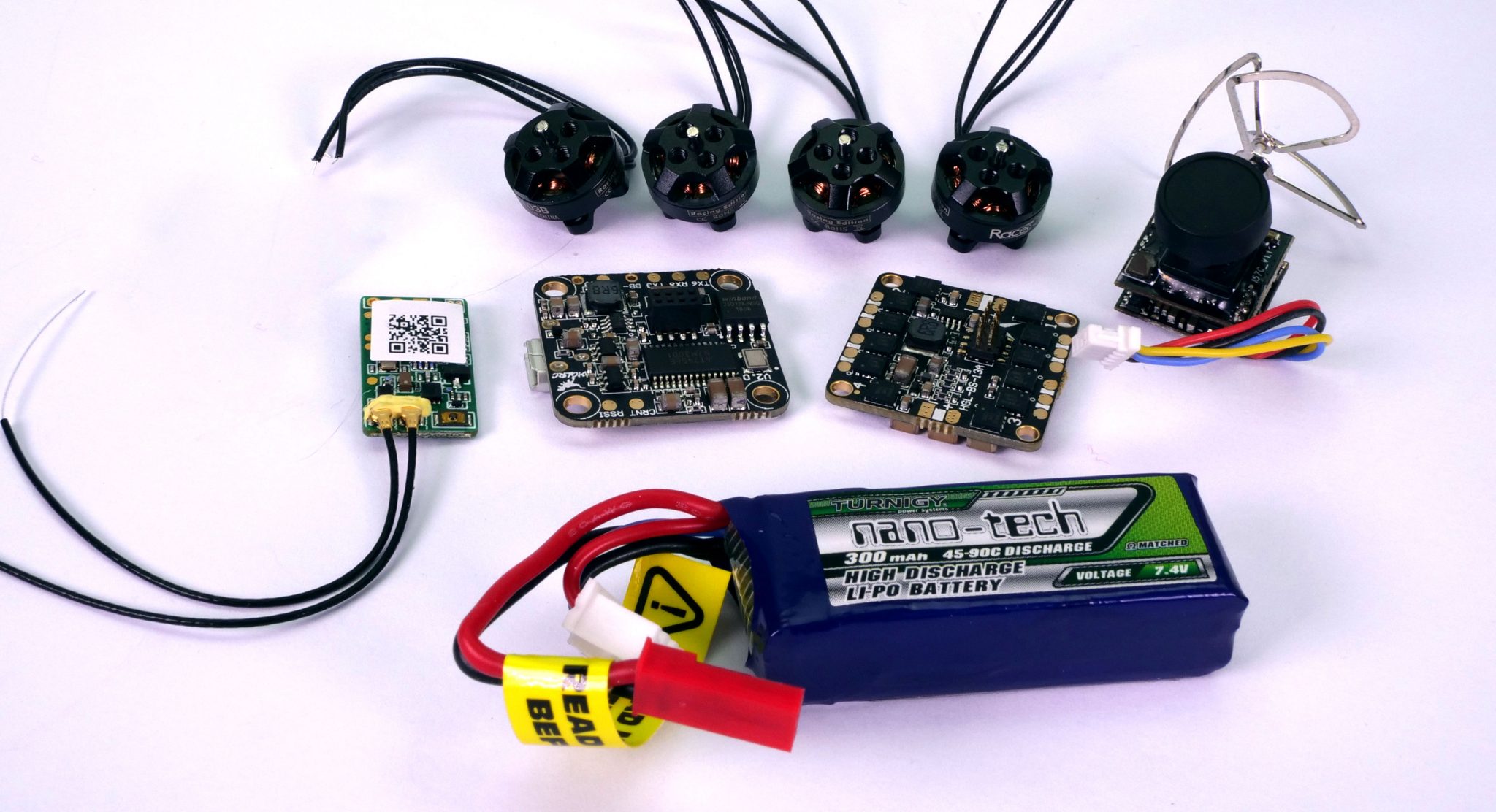
A majority of quadcopters use the same set of parts, but there can be great differences between them in terms of quality or features. Here’s what we’re getting:
| Part name | Purpose | Price | Weight |
|---|---|---|---|
| HGLRC F413 Flytower | Flight Controller + Regulator board for motors | $57.99 | 7g |
| 4x Racerstar RC1103B 8000kV | Motors | $28.99 | 14.8g |
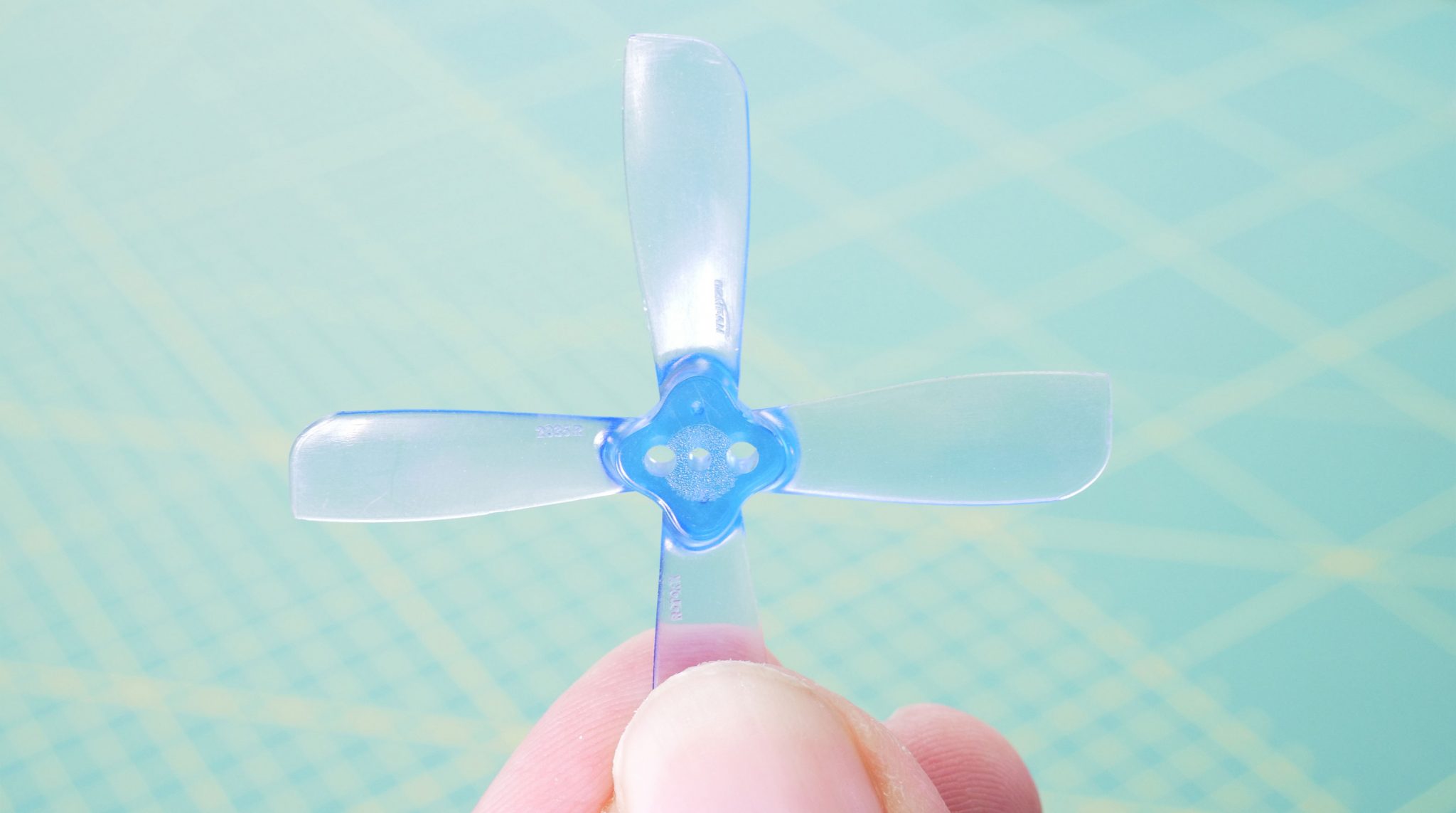
| 2035 propellers | 2 pairs of propellers | $3.99 | 4g |
| Giant Power 2S 300mAh Lipo | Battery | $5.99 | 19g |
| Charsoon Lipo Charger | Battery charger | $13.99 | – |
| FlySky FS-i6 | Radio Transmitter | $39.50 | |
| FS-RX2A Pro | Receiver | $6.99 | 1g |
| JST Connector | Connector for the battery | $1.59 | 1g |
| 3-wire servo cable | To connect the receiver with the flight controller | $0.89 | 1g |
| Frame | 3D printed | 16g | |
| Total | $159 | 65g | |
| Total with FPV camera | $251 | 69g | |
| Optional accessories | |||
| Eachine VR D2 Pro | FPV Goggles | $67.55 | |
| Eachine AIO 5.8GHz FPV Camera with OSD | Micro FPV camera + built-in video transmitter | $23.99 | 4g |
Plus, you’ll need a couple of zip ties to assemble the frame – but you certainly have some at home. You can use a zip tie to secure the battery as well, or you can get a sticky velcro. Needless to say, it’s better to buy more than one battery and one set of props – the battery lasts for about 4 to 5 minutes, so if you want to fly outside for extended periods of time, having a couple of extra li-po batteries is a good solution. Also, you will break a couple of props before you learn how to control the drone properly. They cost literally next to nothing, so get a couple of spare ones.
The market is actually flooded with all sorts of drone parts. Flight controllers come in dozens of variations, regulators support any kind of battery from one-cell to eight-cell, motors that were impossible to even imagine a few years ago are now cheap and available everywhere. As usual, finding the right parts in Chinese e-shops is pretty difficult. There are often no compatibility charts or proper data sheets, so how are you supposed to find the right items? Well, we have to go through the boring part…
The (not so) boring theory
What makes a quadcopter fly? A set of four motors. Two of them rotate clockwise, the other two counter-clockwise. Each pair of motors has a different set of push/pull propellers (usually called ‘props’). In an ideal case, those four motors should generate thrust at least twice the amount of the machine’s weight. However, the real fun starts at 1:3 ratio and proper racing quads go much higher than that.
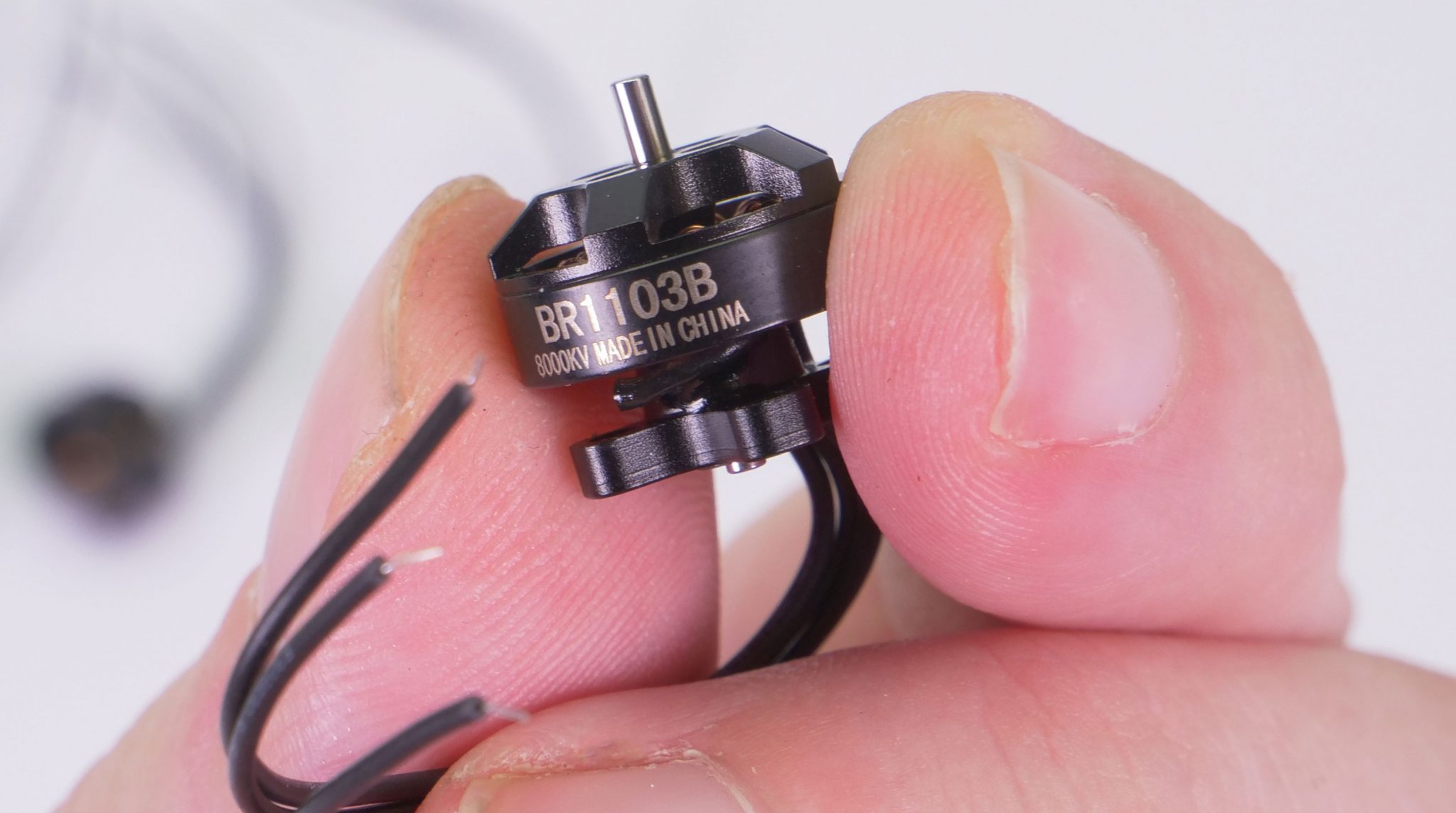
These tiny motors have 11 mm in diameter, but each of them can generate over 70 grams of thrust!
Here comes the tricky part: To power the motors, you need a battery. If you want to spin the motors faster or longer, you need a bigger battery. However, a bigger battery weighs more, so you need stronger motors with bigger props, which in turn require more ‘juice’ from the battery, so they drain it faster. It’s an infinite loop of looking for the best power-to-weight ratio.
With micro quads, we’re usually limited to one- to three-cell batteries, marked as 1S/2S/3S. 1S is quite weak, 3S is a bit of an overkill for new pilots. A 2S (two-cell) battery’s voltage is 7.4V and it is perfect for this project. So let’s see what a 2S Li-Po battery can do with a motor of our choice, the Racerstar BR1103B 8000kV.
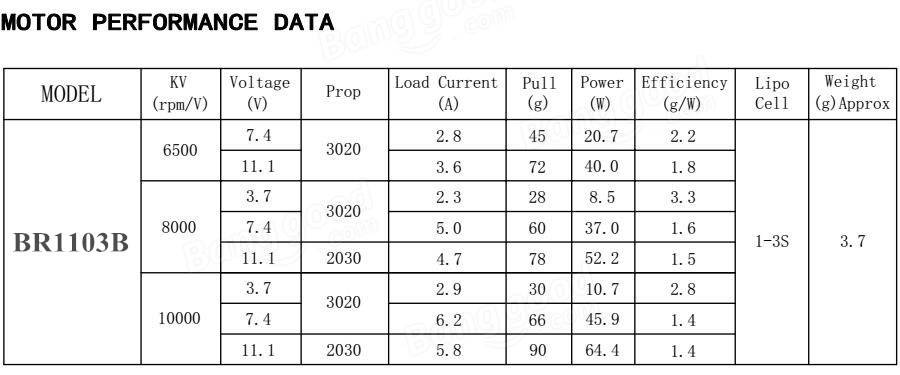
Based on this spreadsheet, it’s clear that BR1103B 8000kV can deliver 60g of thrust when paired with a 2S battery and 3020 props – that’s 3-inch propeller. Multiply it by four and you can reach a total maximum thrust of 240 grams. Our machine’s weight should not exceed 80 grams then, one-third of the maximum thrust. There’s a catch, though. We will be using two-inch props (2035) for the sake of size. However, we shouldn’t lose too much thrust there. Plus, our target for the AUW (all-up weight) is going to be under 70 grams, so we have some headroom.

Nailed it!
Another tricky aspect of the setup is to get parts that are compatible with the voltage of the battery. A 2S battery’s voltage will be between 6 to 8.4 volts, so make sure the parts you buy won’t be fried once you hook them up.
Motors are usually compatible with a broader range of voltages, while the electronics (flight controller, ESCs, cameras) are usually more limited. So which flight controller should you pick? Our build is limited by the 20x20mm mounting holes, so that narrows it down a bit. We want a board with a built-in OSD (On-Sreen Display), microUSB port and BetaFlight software support. HGLRC brand is a good choice, because they produce both flight controllers and ESC boards, which can be connected with a nice little socket.

An OSD system can give you plenty of useful information
And what is an ESC board? It contains regulators for all four motors, which means it controls their rotation speed and direction based on the input from the flight controller. Based on the spreadsheet above, our motors draw currents of around 5A. Keep that in mind when choosing your 20x20mm 2S regulator. The one we chose (HGLRC Micro 13A 4in1) supports 13A per motor, so we’re safe.
The receiver usually works with one of three favorite protocols – FrSKY, FlySky or DSM-X. Cheaper RC transmitters often use FlySKY protocol, so let’s stick with that one. The receiver should be able to communicate with the flight controller using an SBUS or IBUS single-wire interface.
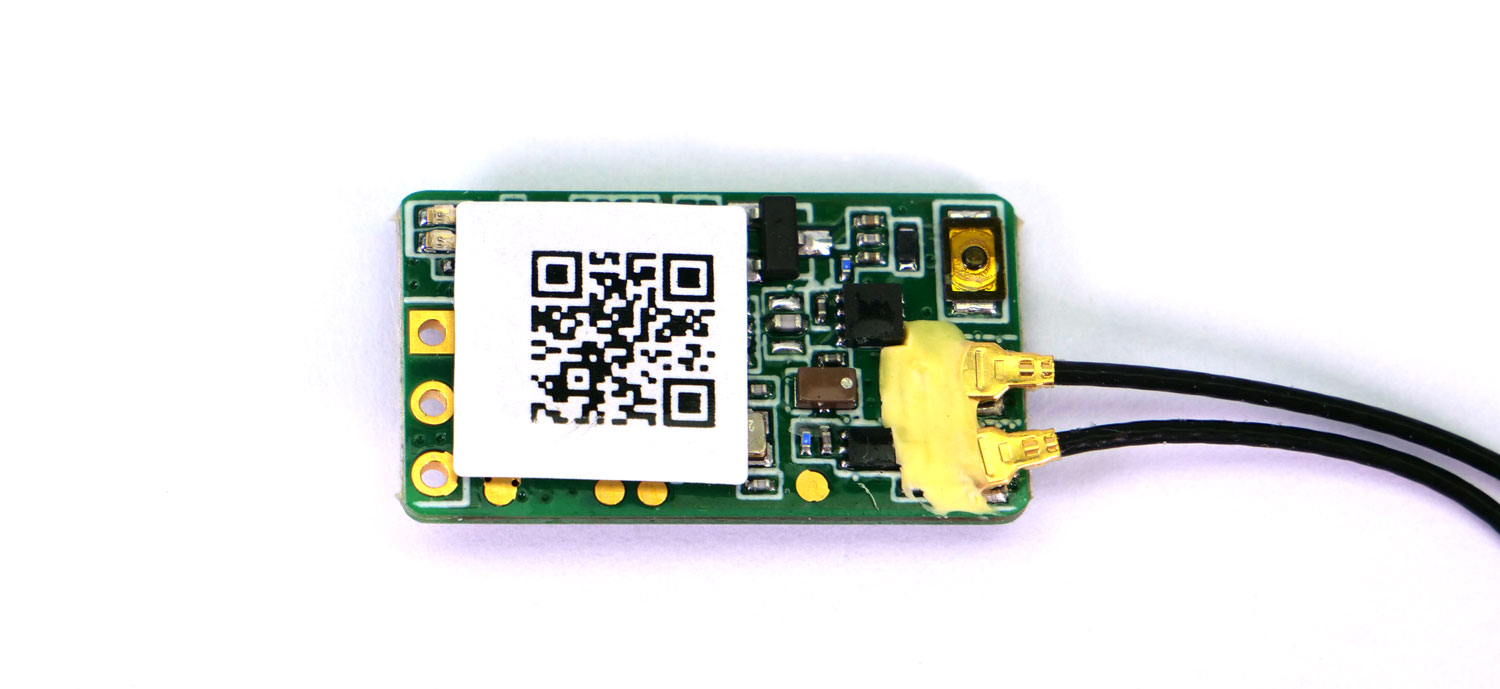
FrSky XM+ receiver for FrSky-compatible radios
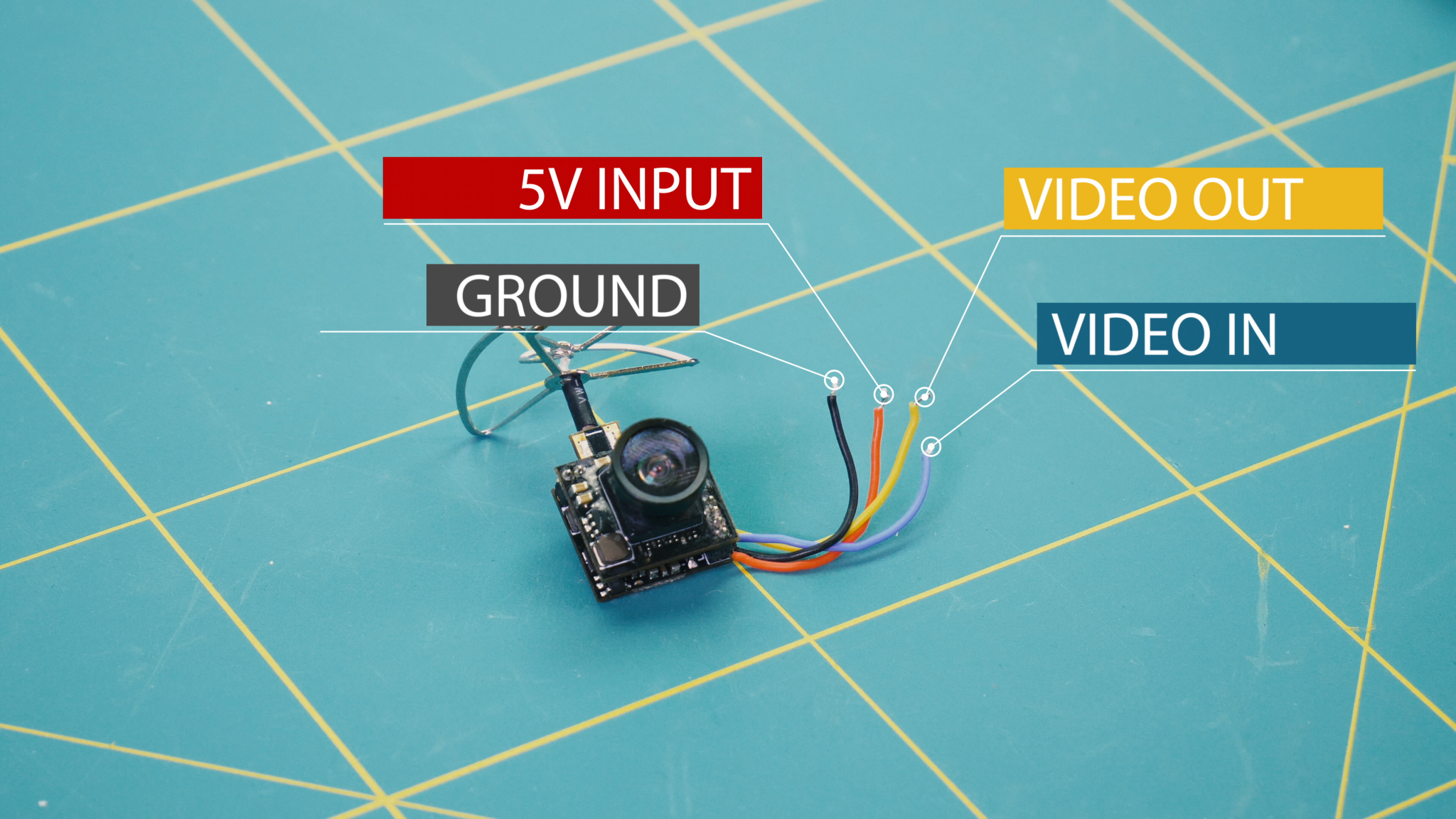
And the last thing – the camera. You can get all sorts of tiny cameras, some are just basic cameras, others can record video on an SD card, some even have and extra wire for video in – and that’s exactly what we need. To fully utilize the OSD function of our flight controller, we will need a camera with four wires: Voltage, ground, video out, video in. If you don’t need an OSD system, feel free to use any of the Eachine’s product line – they’re cheap and reasonably good. Just keep in mind that in many countries, there are limits on the transmitting power 😉
So those are the main components. Next, you need a 2S battery, ideally a 300mAh li-po, which will give us a little over 4 minutes of flight time. 400mAh should work as well, just keep an eye on the weight!

Turnigy 2S 300mAh Li-po battery delivers slightly more than 4 minutes of flight time
What about the transmitter and FPV goggles?
Good question. There are many RC radios on the market, so selecting the single best one is nearly impossible. You can get a decent beginner RC radio for as low as 39 USD for a simple 6-channel model (which is actually perfectly fine for our cheap micro quad) or 50 USD for a 10-channel model. Price equals quality, so if you think you will find some use for a better transmitter in the future, feel free to get FrSky Taranis Q X7 and FrSky XM+ instead of the parts we suggested in the shopping list above. The price for both items together is actually around 130 USD, so if you want to save as much money as possible, get anything at least decent looking 🙂 We chose a Flysky i6, which is a nice cheap option for absolute beginners. More advanced pilots should stick to FrSky transmitters and receivers.

Flysky FS-i6 and a compatible receiver
As for the FPV goggles, we can apply the same rule of thumb here: more money gets you a better FPV kit. The absolutely cheapest solution is to buy a USB video receiver, plug it into your Android phone and place it in one of those cheap “VR” kits – which is essentially just an empty box for your phone – think Google Dreamview, but cheaper. This solution isn’t bad at all, but the device needs to convert an analog signal to digital, which introduces a slight lag of ca. 100ms. For beginners, this won’t probably be a major issue, but skilled pilots won’t be happy. Going analog is the right way. Eachine produces some rather good FPV goggles, while Fatshark is the expensive (and better) choice.

Going for a super-cheap FPV isn’t the best option
For this project, we have selected an FPV camera that has a built-in video transmitter that sends analogue picture on the 5.8 GHz frequency. Almost every FPV goggles have an auto-scan button. So once you turn on the drone, the camera will start transmitting the picture on a selected frequency. Use the auto-scan function of the FPV Goggles to tune to the same frequency and receive the picture from the camera.
Micro FPV camera with a built-in video transmitter.
3D printed frame
Here’s our take on a micro quad, sometimes called a Tiny Whoop. I’ve built a couple of tiny quadcopters in the past few years and there were always some issues with available frames. Some were too fragile, others were without prop-guards, and finding the right 3D printed frame for 20×20mm electronics and 1103 motors wasn’t easy. Plus, the ones that I found usually required a number of tiny screws and nuts. Once you hit an obstacle too hard and the plastic cracked, it took some time to disassemble the drone and fix it. Another thing is that many designs don’t take the battery into consideration, so if you place it on the underside of the frame, the quad is a bit wobbly during takeoff or landing.
This is what I came up with – a frame for 1103 motors, 2-inch props and 20×20mm electronics. It has a holder for a camera and the battery is placed on the top. Everything is held together with small pieces of cut filament and zip ties – yep, you heard that right. Despite the lack of screws (there are only those for motors), the construction is pretty solid and there’s no wobble at all. Disassembling and reassembling takes just a minute.

DOWNLOAD FRAME STL FILES FROM THINGIVERSE
Everything can be printed without supports and since there are more parts, you can use filaments of different colors to truly customize and personalize your drone. There is no antenna shield at the moment, but truth be told – after several hard crashes, the only parts that cracked were the prop guards. The whole frame weighs only 16 grams, so it’s perfect for our case. You can save other 3-4 grams of total all-up weight by removing the prop guards. And the advantage of a 3D printed frame is obvious – if you damage it, you can easily print another. So it’s never a bad thing to carry a couple of extra parts in your bag when you go FPV flying 🙂
You can check out the first part of the assembly process in the gallery below.
Powered by BetaFlight
Once you have all parts soldered together, you can move onto the binding procedure. Check out the guide below:
Then, it’s time to configure the software. Our favorite solution is BetaFlight.
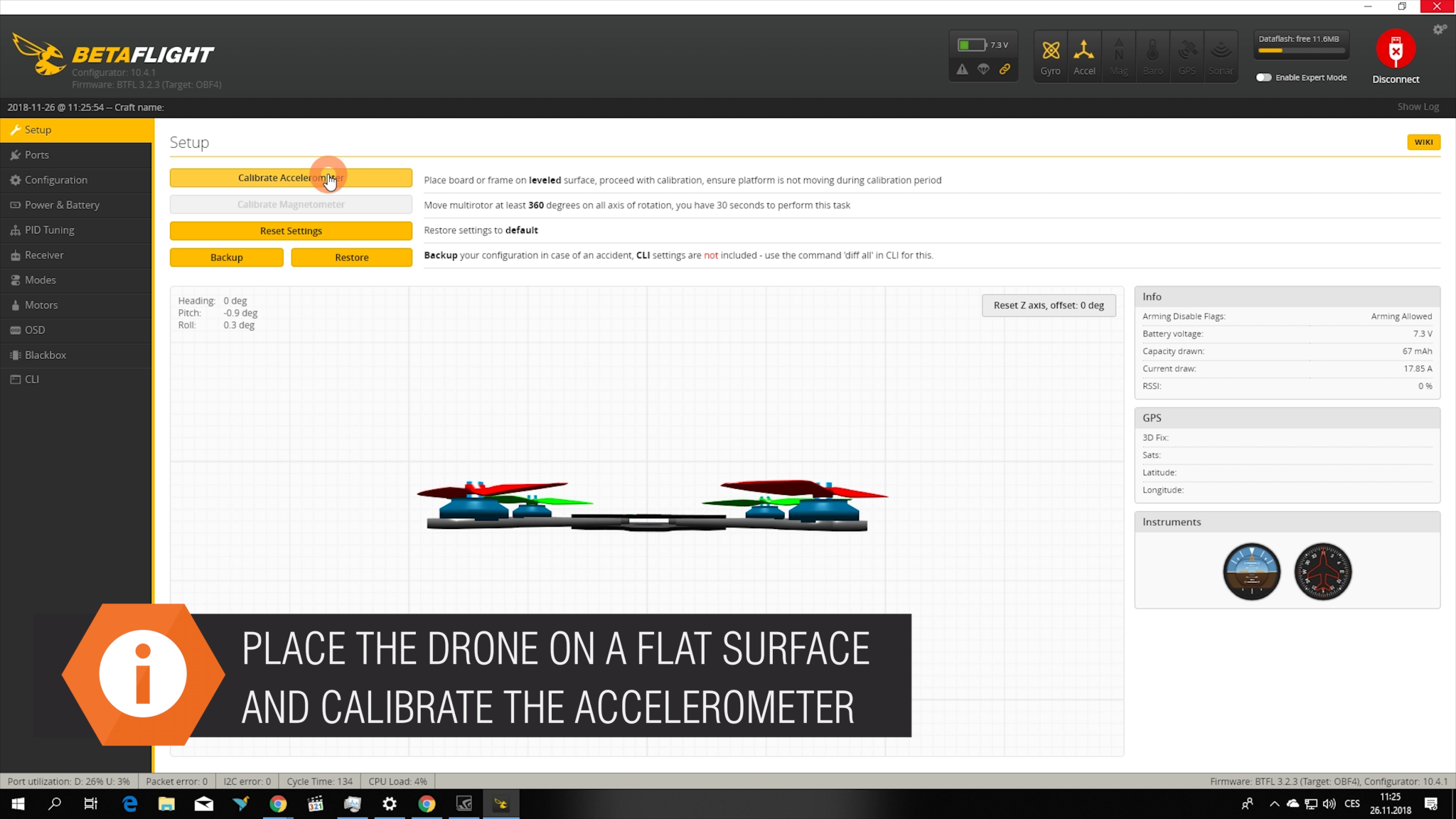
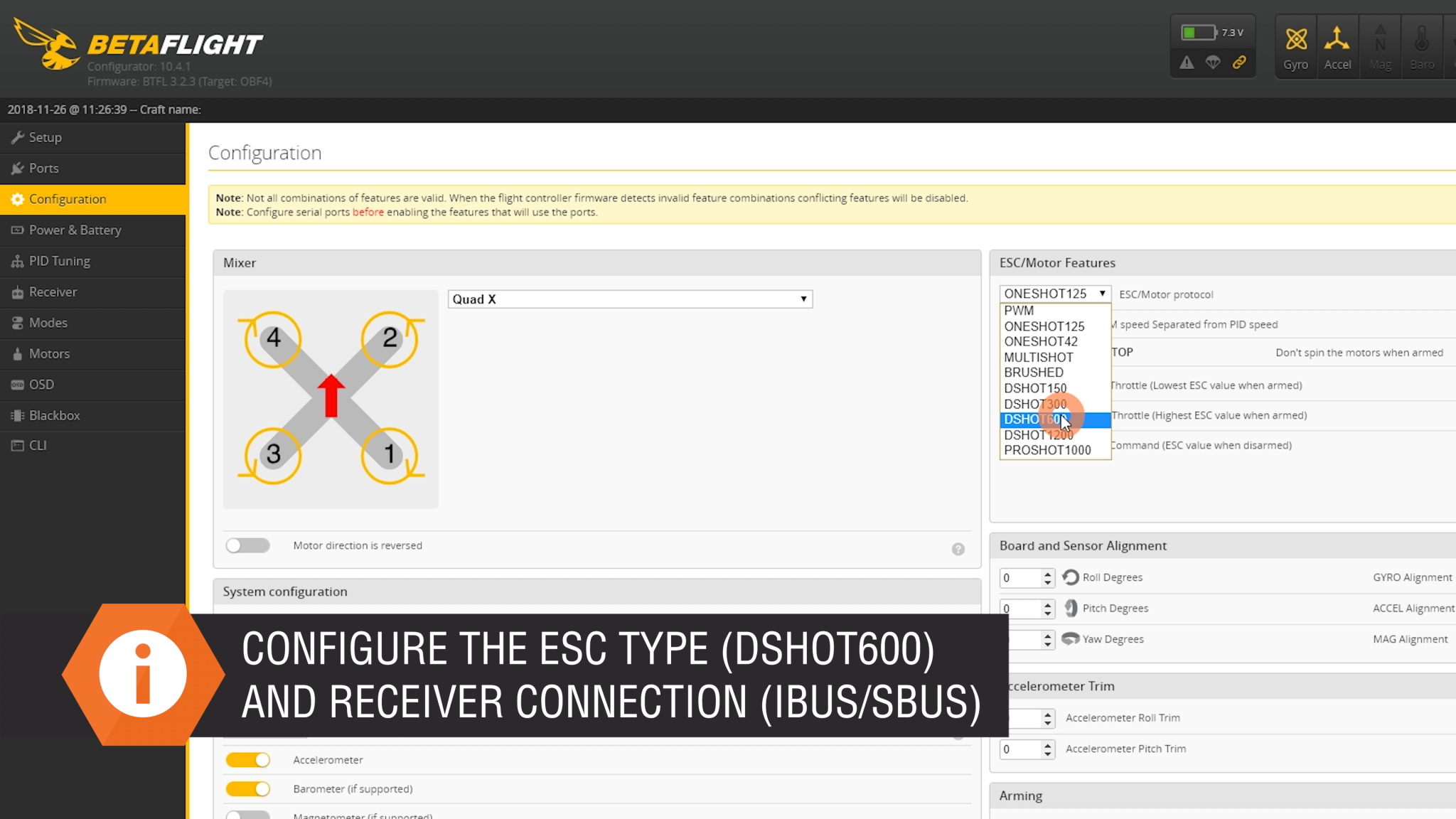
BetaFlight is a powerful free tool for configuring the flight characteristics of a wide range of flying machines. The basic setup is incredibly easy – first, place the drone on a leveled surface and calibrate the accelerometer.
Then, select the protocol of your ESC board. In our case, we decided to go for DSHOT600 ESCs, because they allow us to do some very nice things – like changing the spinning direction of motors using a software configuration. Some of you probably still remember the need to add banana plug connectors to motor wires, so you could switch them in order to reverse the motor’s direction. No more!
Once the ESCs are configured, the next step is to set up the transmitter protocol – we are using a serial-based receiver, which communicates via an SBUS interface. The last step is to enable the receiver serial port – usually UART1.
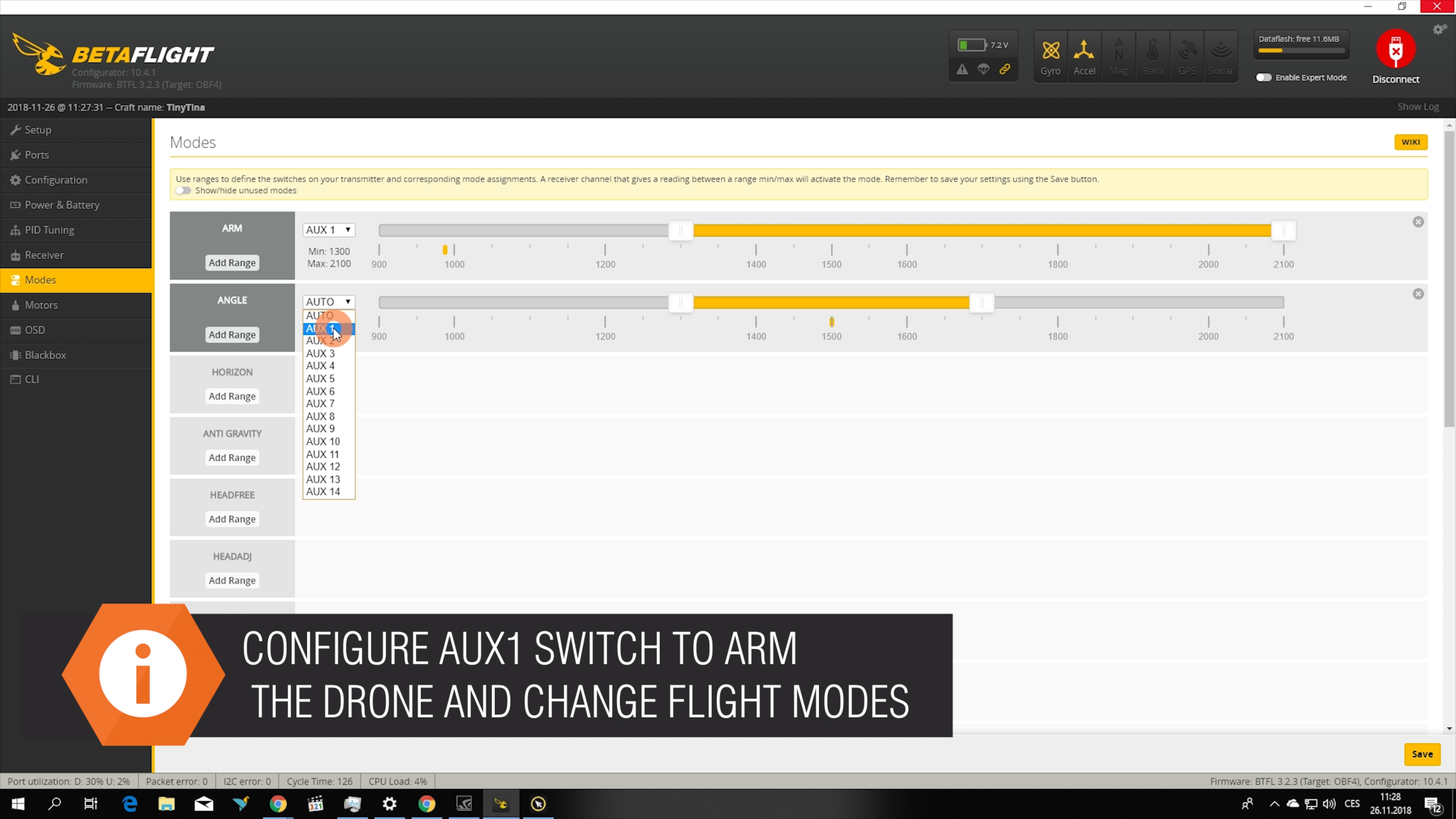
Next, we need to tell the drone how to react to the transmitter commands. BetaFlight features an easy to use interface that allows you to map arming and flight mode switching to a single AUX1 switch (but you can, of course, use one switch for arming and another switch for flight modes). You can use the sliders to assign a certain action to transmitter inputs. e.g. AUX1 switch in default position causes the drone to stay in “Disarmed” mode. Position two and three arms the drone (props start spinning at low speed). Now, you can add two flight modes to positions two and three. Keep in mind that when you push the AUX1 switch to default (top) position, the motors will be immediately disarmed – even mid-flight!
I won’t go into explanation of every single flight mode here – there’s just way too many of them and you can find the complete description at BetaFlight’s website. Beginners should start in Horizon mode (auto-levelling), more advanced pilots will probably prefer Angle mode which allows for more direct control of the drone.
Now, you can finally finish the rest of the frame. Step-by-step instructions are in the gallery below:
You spin me right round…
We have almost everything ready for a takeoff. However, it’s time for the most important part – testing the motors and attaching the props. Each of the motors has to spin in a specific direction to generate thrust. The same applies to props.
Plug the battery in and then connect the drone with a microUSB cable to your PC. Open BetaFlight, go to Motors section and enable the test mode. Make sure there are no props on your drone, otherwise you’re risking injury (or damage to your drone). Use the sliders to test all four motors and observe their rotation. They need to match the illustration below. If some of them spin the wrong way, don’t worry. It can be fixed using BLHeli Configurator app.
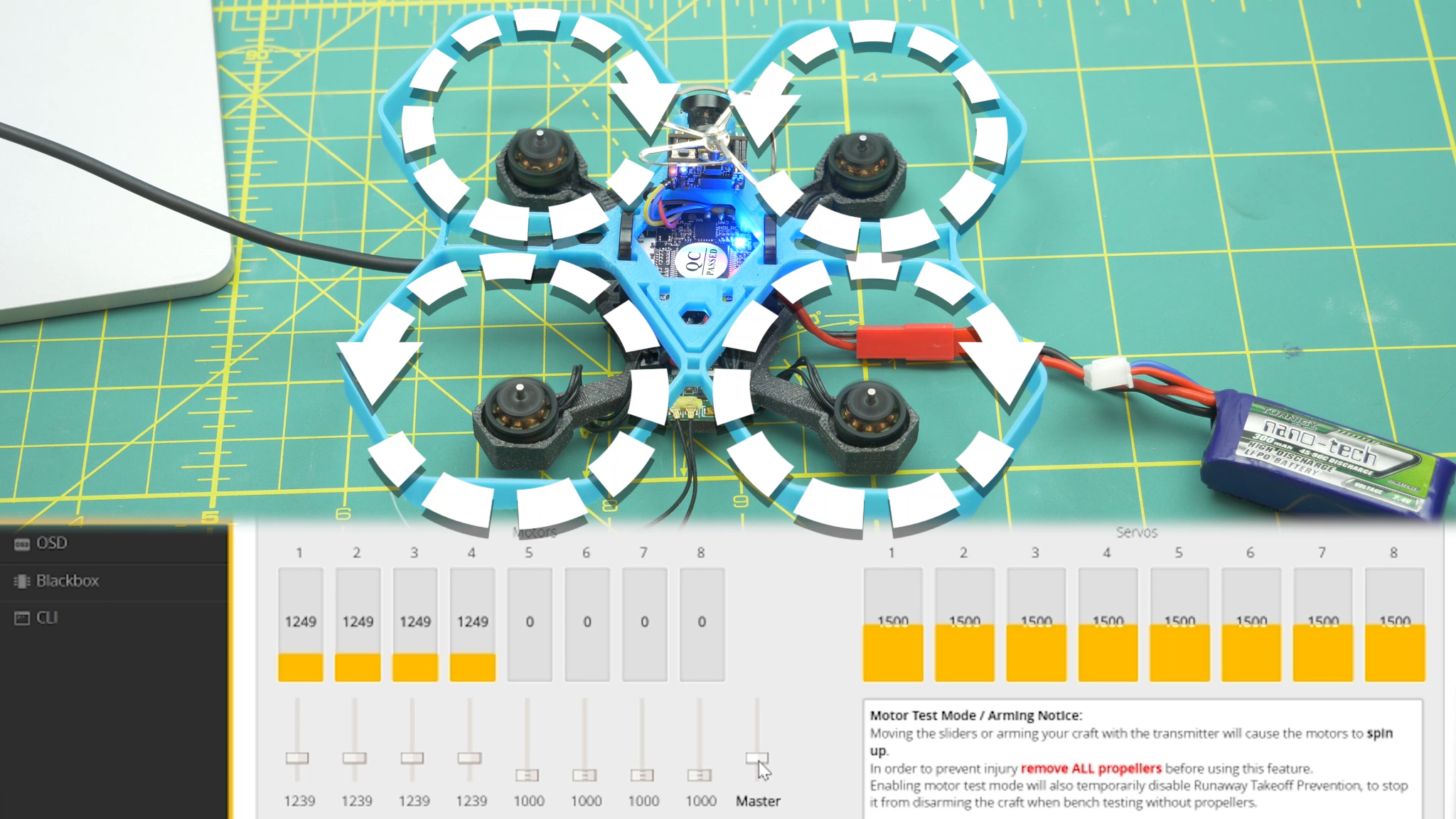
The correct direction for motor rotation
Using BLHeli Configurator is pretty straightforward. Shut down BetaFlight, keep the drone connected with a microUSB cable, start BLHeli config and press the button in the lower right corner to read the values. You will see the direction of each of the motors. Change those that spin in the wrong way and save the values. Then go back to BetaFlight and check the motors again.

Finally, it’s time to add the props. Again, the props need to be attached in a specific order. There are two types: clockwise and counter-clockwise props. Check the diagram below to learn how to place them correctly.
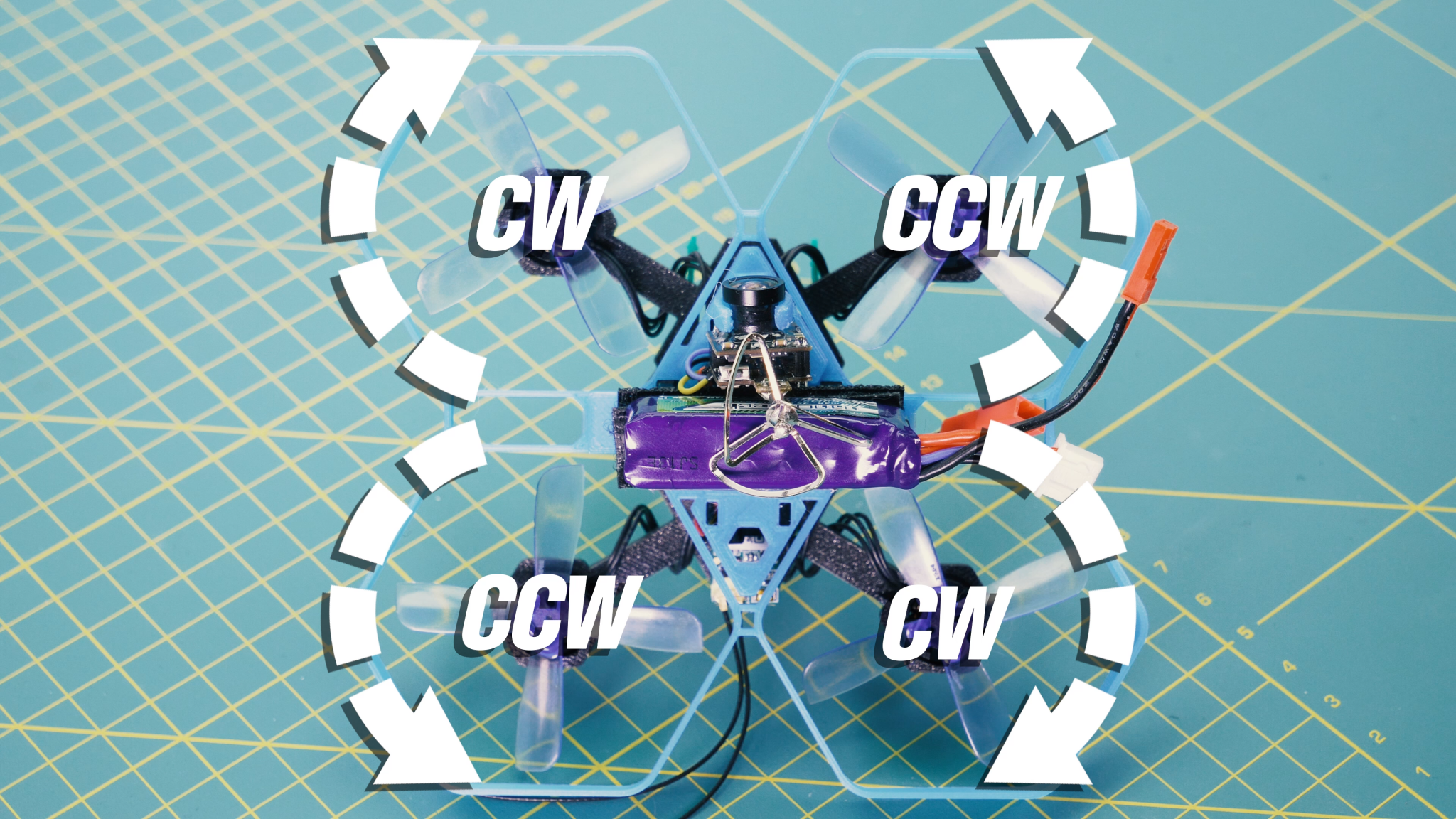
The correct placement of clockwise (CW) and counter-clockwise (CCW) props
Once this is done, you can find some empty space, place the drone on the ground, arm it and gently raise the throttle. The lift-off should happen at around 30 % of the throttle. In case the drone flips or won’t lift off at all, its motors are probably spinning in the wrong direction or some props are placed incorrectly. Double-check everything, fix possible errors and try again.
Fly low, stay safe
Flying modern micro drones can feel almost like playing a PlayStation game. These little quadcopters are incredibly agile and they react to minimal input with great accuracy. New pilots have a tendency to push the sticks all the way forward because they don’t expect there’s so much power in such a small device. So… start slow, without FPV goggles. Learn how the drone reacts to tiny increments of throttle, yaw or pitch. Learn how the acceleration and inertia affect the drone and, of course, keep your distance from people, pets or inaccessible (and restricted) areas. This drone may be light, but the props spin at high speeds.

The parts that we selected have a nice little ‘side effect’ – they can run on a 3S battery and the motors can spin bigger props than the selected 2035. This means that once you’ll have enough of this tiny drone, you can step up your game and mount these parts on something bigger with much more power.
But that will probably take a while. In the meantime, we hope you’ll have fun with this little beast. We certainly did 😉

And let us know if you would like to learn more about bigger 3D printed drones (think DJI-sized) with a proper camera, because the fun doesn’t end with tiny quadcopters!
Great article and would love to see more of these type of great articles especially about a larger sized one.
Any chance of a full set of instruction? Drone built, software obtained, all parts as listed but the drone will not respond to the transmitter. Need a guide will all of the settings so we have a baseline to work from please.
I posted a solution as a main comment if you are still looking to fix it.
The link for the camera is dead, I chose this one instead :
https://www.banggood.com/Eachine-AIO-FPV-5-8G-25mW-48CH-VTX-600TVL-CMOS-14-inch-Camera-For-Aurora-90-100-Mini-FPV-Racer-p-1122902.html?akmClientCountry=BE&rmmds=cart_middle_products&cur_warehouse=CN
Hope it will work ! 😉
Did you ever receive any input MercuryRH? I am stuck in the same spot.
I posted a solution as a main comment if you are still looking to fix it.
I’m working on this project right now. The parts list mentions the F428 flight controller. However, the link and all the examples are for the F413. A F428 presents some challenges since the motor pads are longer and get in the way of mounting the receiver. Additionally, the pads for the battery also stick out, and this makes using the zip ties more difficult when assembling.
As another commenter noted, the listed Eachine Lizard camera isn’t available. I went with a TX05 (since it already had the osd cable) but it requires making a different camera mount.
Fun project!
Can you share your camera mount?
The FS-RX2A Pro has 4 leads, not 3, where do I connect the fourth beige wire?
If I’m not mistaken it’s the PPM wire. Altough I never managed to get the combination FlySky i6 + RX2A + F428 working. Going to try The FlySky X6B tonight.
I posted a solution as a main comment if you are still looking to fix it.
Xill… I really appreciate looking for the solution to get the transmitter to connect to the drone. I used your work and it worked for me. I can see the values change in BetaFlight as you move the sticks on the controller…However, I cant seam to get the motors to respond to the controller. I’ve done everything you recommend and the original video recommends. No matter what I do, I cant get them to react to the controller…
I didn’t deviate from the parts list. I’m using all the parts as specified
Also, I can get the motors to spin using BetaFlight, so I know they are soldered correctly.
I purchased enough parts to make 3 drones for my kids. Please help w/ suggestions to get it to respond.
Thanks,
Matt
Hi Matt,
Any luck with your query?
I took this up recently myself, and I’m stuck in a similar position – I can get my transmitter (FlySky i6) to talk to Betaflight and Betaflight to talk to the FC (F413 Omnibus F4), but I can’t get the transmitter to talk to the FC!
Any nudge in the right direction will be appreciated,
Cheers, Sid
The video is wrong if you buy and use the recommanded part in this guide :
FS-RX2A Pro V1
FS-I6
HGLRC XJB F413 Omnibus F4 Flight Controller
When in Betaflight, you wont be able to get the Receiver to communicate.
I found the anwser buried in some post on Reddit : https://www.reddit.com/r/Multicopter/comments/7nbc1z/no_radio_input_in_betaflight_hglrc_xjb_f428_fsa8s/
You need to solder the IBUS wire of the FS-RX2A Pro V1 (which should be yellow) to the RX6 pad(which is on the othe side of the board, not the same side as the 5v/ground/sbus/ppm).
Then in Betaflight : in Configuration, its IBUS, and in Ports its UART6.
This solution worked for me.
Im really mad at this guide. I wasted a lot of time and almost threw away and wasted all that material/money because i thought i was the issue…
There at least 3 other person just in this comment section that got stuck on this without the solution.
Alternative: Solder the YELLOW wire to the DSMX pad and use UART1.
I wrongly assumed that the V1 version of the FS-RX2A would have the same pinout as the version without connector…
I tried this as well but they don’t talk, is there anything else I need to do for pairing or in the betaflight settings? Thanks for your help
Hi Xill,
Thanks for the tips.
As i mentioned in an earlier comment, I can get my transmitter (FlySky i6) to talk to Betaflight and Betaflight to talk to the FC (F413 Omnibus F4), but I can’t get the transmitter to talk to the FC. I’ve tried the soldering arrangement and config that you recommended, but with no luck. Any inputs will be appreciated,
Cheers! Sid
Have you set up the arming sequence in betaflight. It’s under the modes tab, click add range and select one of the aux connections to run it. Check the receiver tab to see which of the switches and knobs are the various aux options and pick an appropriate one and select a range.
If you haven’t done this then you will see the receiver working in betaflight but when you disconnect it and run only on battery the drone won’t accept an input until it sees an arm as failsafe. The transmitter doesn’t talk to betaflight only the receiver betaflight just shows what the receiver is seeing. So it sounds like your wiring is correct.
hello, unfortunately I have been stuck for days, I tried putting yellow on rx6, on betaflight I set uart6, but the receiver does not talk. for the pairing, I hold the button and then turn it on but it doesn’t pair, what is the procedure? Did you connect the 4 wire or not? thanks for the help
First flight proof for the wiring solution.
Camera was DOA and still waiting on battery, so i’m runing from wall adapter.
https://i.imgur.com/2sMyii7.jpg
https://youtu.be/wX_Qi6aQ728
Nice project, but I’m actually in the configuration step and I have several remarks :
-the frame cannot be horizontal if you put it on a flat surface, the zips and motor wires are messing up the horizontality. Several solutions are on the way
-the USB prot is too close to the top frame, it’s almost impossible to connect any normal cable without cutting the zip tie. Fix on the way by modifying the top frame shape.
Hope I’ll fly soon !
😉
So the list says HGLRC F428 Flytower but the link goes to HGLRC XJB F413 Omnibus F4 Flight Controller. Which one should I buy? The F413 or the F428 linked here: https://www.banggood.com/20x20mm-XJB-F428-Micro-F4-AIO-OSD-BEC-Flight-Controller-28A-Blhel_S-BB2-2-4S-4-in-1-ESC-p-1191889.html?rmmds=search&cur_warehouse=CN
Hi, nice project!
The comments here about IBUS helped me out a lot already. One question though: My F413 came with an additional capacitor. The manual isn’t really clear on where that goes. Looks like the underside of the USB port. Do I need that thin? If so, where exactly do I put it.
Thanks
You can solder it to the power connectors along with your battery connection so you have the cap and battery supply on the same terminals. It’s not required but can help filter out electrical noise.
hello, congratulations on the project. I tried to make it too, but the receiver has a difference in the video, it has 4 wires, just connect only 3 black red and yellow wires to the ibus? or should the hammer be connected? thanks for the help
The link to “Eachine AIO 5.8GHz FPV Camera with OSD” is broken and gives me a 404 error. Can you recommend any other options? Thx
+1 for a reply to this question too please
I can’t find the flight control board listed there all out of stock and alternative options
Sorry for spelling errors its late
I just tried to create this fantastic fpv drone baut i can’t find 2 or 3 of the parts linked above in the shopping list for example the flight controller the fpv Googles and the fpv camera.
Can anyone link me another compatible parts to Substitute the original ones? Thanks
Building your own drone is challenging but 3D printing has made this easy and cheap. Different companies are offering drones but with low quality and high price so you should try it now to lookup California license. This 3D printing can be used to make our own drone. You can follow these steps to make your own drone. This will be the best drone for you.
hey i was wandering if there is anywere that i can get the HGLRC F413 Flytower because the link dosnt work
mark
Built the drone and got stuck on the programming step with Betaflight. I have a MacBook and downloaded the version for MacOS and also the virtual comport drivers from the link provided in Betaflight but I cannot connect to the FC (which is the one used here). The system runs on OS 12.6, don’t really know what to do next. Anyone has an idea or went through the process on a Mac? Thanks a million!
Hi, is it possible to update this article with working links again?
would love to build one